電子稱重系統受壓力影響的解決方法探討
時間:2016-08-31 10:11
隨著技術的進步, 由稱重模塊為核心的電子稱重系統已廣泛地應用到各行各業, 實現了對設備物料的快速�、準確的稱量, 特別是隨著微處理機的出現, 工業生產過程自動化程度化的不斷提高, 稱重系統已成為過程控制中的一種必需的裝置,從以前不能稱重的大型罐����、料斗等重量計測到混合分配多種原料的配料系統���、生產工藝中的自動檢測和粉粒體進料量控制等, 都應用了稱重系統, 目前, 稱重系統幾乎運用到了所有的稱重領域�����。本文就常用的電阻應變式稱重模塊構成的稱重系統進行探討��。
1 稱重原理
1 . 1 稱重模塊
根據稱重模塊在實際應用中受力特點,稱重模塊分為兩種,靜載稱重模塊與動載稱重模塊。靜載稱重模塊適用于只受垂直作用力的場合��。如槽罐�����、儲料斗的重量檢測。動載模塊適用于作用力較明顯的場合。如平臺�����、生產線���、傳送帶的重量檢測���。
稱重模塊是一種新型的稱重元件,它將稱重傳感器��、負荷傳遞裝置和安裝連接件等部件組合在一起,可以非常方便地和各種形狀的機械裝置相連接,如滾道�、平臺����、立罐、槽罐、料斗等���。以稱重模塊為核心的電子稱重系統既可以保證稱重的精度高,長期穩定性好的特點,又解決了因安裝不當而造成的稱重誤差。使用稱重模塊的系統在理論通常上能達到優于萬分之五的測重精度。
1 . 2 電子稱重系統組成
電阻應變式稱重模塊是基于這樣一個原理:彈性體( 彈性元件,敏感梁) 在外力作用下產生彈性變形, 使粘貼在他表面的電阻應變片( 轉換元件) 也隨同產生變形, 電阻應變片變形后, 它的阻值將發生變化( 增大或減小),再經相應的測量電路把這一電阻變化轉換為電信號( 電壓或電流) , 從而完成了將外力變換為電信號的過程��。
由此可見, 電阻應變片���、彈性體和檢測電路是電阻應變式稱重模塊中不可缺少的幾個主要部分�����。以一個典型的化工料罐為例, 安裝在
料罐底部的稱重模塊將料罐的重量信號傳至接線盒�����。接線盒中并聯各路稱重模塊信號, 并可根據各稱重模塊受載情況調節角差, 經過匯集后的重量信號送至重量變送器��。重量變送器將重量信號處理成相應的重量數據輸出至控制系統�����。
如圖1 所示, 檢測電路的功能是把電阻應變片的電阻變化轉變為電壓輸出�。在所加橋壓U 不變的情況下, 傳感器輸出信號與作用在傳感器上的重力和供橋橋壓成正比, 而且, 供橋橋壓U 的變化直接影響電子稱的測量精度, 所以要求橋壓很穩定�����。因為惠斯登電橋具有很多優點, 如可以抑制溫度變化的影響, 可以抑制側向力干擾, 可以比較方便的解決稱重模塊的補償問題等, 所以惠斯登電橋在稱重模塊中得到了廣泛的應用�。因為全橋式等臂電橋的靈敏度較高, 各臂參數一致,各種干擾的影響容易相互抵銷, 所以稱重模塊均采用全橋式等臂電橋��。
2 稱重系統的工程應用
2 . 1 工藝簡述
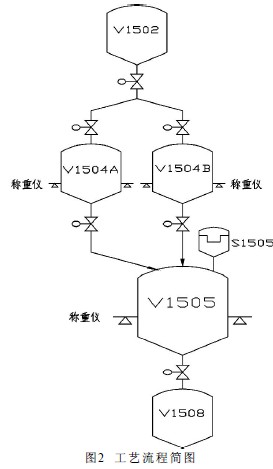
如圖2所示,在安慶石化的SHELL煤氣化裝置中, 粉煤灰的進料與放料都有一套復雜的自動順序控制系統, 用于定時完成對介質的進料和放料, 工藝流程簡圖如下所示�。循環順序控制基本分為減壓�����、放料���、充壓�����、進料等部分,鎖斗罐充壓后與上部高壓設備均壓連通進料, 進料完成之后與上部高壓設備隔離,減壓至接近常壓,再與下部放料罐均壓連通放料, 較后放料罐常壓放料。運行中在進料和放料時鎖斗罐收集的灰量是作為循環順序控制中的判別條件,這個重量達到設定值則程序向下進行,鎖斗罐與上下兩臺設備間的高低壓隔離以及均壓后連通和放料,否則程序保持,繼續收集煤灰。因此不難理解對鎖斗罐收集的灰進行稱量是保證在不中斷氣化爐運行的情況下定期對灰進行收集和放料。
2 . 2 設備配置
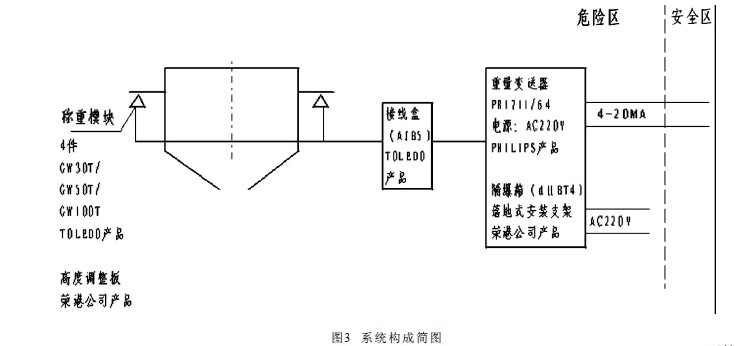
鎖斗罐V1504A/B和V1505是煤氣化工藝裝置中需要稱重控制進出的設備, 設備稱重儀系統采用了分度數高、綜合性能好、抗干擾能力強�、長期穩定性和工作可靠性好的梅特勒-托利多的高溫數字稱重模塊,其內部有稱重傳感器和微處理器芯片,可以對自身進行診斷,每個傳感器都有自己的地址,采用高精度高速A/D轉換技術�����、全面的傳感器數字補償技術以及遠程高速防爆通信能力, 穩定性和過載性能超越了常規稱重模塊的極限,稱重變送器采用的是菲利普的PR1710系列儀表,能夠在線監測各個傳感器輸出并進行智能處理, 達了
OIML C6的精度。
如圖3所示,安裝在底部的四個壓式稱重模塊將罐體的重量信號傳至接線盒����。接線盒并聯各路稱重模塊信號, 并可根據各稱重模塊受載情況調節角差, 經過匯集后的重量信號送至稱重量變送器。重量變送器將重量信號處理成相應的重量數據傳輸到D C S控制系統��。
3 應用中出現的問題及分析
3 . 1 問題的提出
設計對V1504A/B和V1505的灰量是采用靜態稱重方式,在靜態調試時,所有的標定工作都很正常���。但裝置運行后設備在工作中內部壓力是交變的,溫度也有變化,發現設備V 1 5 0 4 A / B 和V 1 5 0 5 的稱重儀15WT0001/0051/0002測量顯示重量隨壓力升高而增大, 并與溫度變化也有一定的關聯, 這樣一來就影響了工藝過程測量和控制, 導致進料與放料的自動順序控制系統無法正常運行�����。
3 . 2 問題分析
經過我們對現場安裝情況的詳細檢查,首先拆除設備上部膨脹節的保溫層��。逐個檢查膨脹節螺栓的緊固狀態;松解緊固的螺栓,同時觀察設備稱重儀顯示狀況,顯示向誤差減小的方向恢復,說明是該原因造成誤差的因素之一。設備稱重儀稱重數據是否受壓力影響取決于設備的開口位置�����、大小���、管道連接方式��、安裝水平等確定,關鍵是否存在剛性連接����。出現稱重數據受壓力影響,表明存在剛性連接����。在設備關聯的膨脹節中,有壓力平衡式,對設備的受力狀態影響很小;也有采用通用型的,就存在盲板力,盲板力由設備和上方的固定點承受,盲板力與工作壓力有關,工作壓力(內壓)越大,盲板力越大。原因分析清楚了,但是短期內改變設備的開口位置����、大小��、管道連接方式都是非常困難,甚至是不可能的。
4 解決方案
4 . 1 設備安裝上的整改
原稱重傳感器的限位機構布置情況限位效果較差,間隙不在8~11mm以內;我們進行了重新調整���。工作時罐體溫度升高比較多, 限位機構與罐體裙邊的間隙過小容易發生摩擦卡死出現附加誤差現象, 整改后消除了這一現象��。
4 . 2 建立數學模型進行軟件補償
通過長時間跟蹤工藝操作數據我們發現,稱重顯示重量隨壓力升高而增大是有規律的,重量和壓力曲線基本上是線性,這樣為修正提供了可能�。我們嘗試建立數學模型,用軟件方法在DCS中完成壓力修正補償����。根據掌握的情況, 在壓力和溫度兩個因素中,目前表現出壓力影響大,溫度影響小,故應該首行壓力修正工作,而操作記錄數據表明, 稱重顯示重量受壓力影響基本是線性關系, 因此整個修正補償建模工作大體上分為三步。
第一步,根據要求,在修正中需要一并考慮壓力和溫度的影響���。故將數學模型暫以下式表示:物料重量(G)=顯示重量(Gx)-K1壓力(P)-K2溫度(T)即G=Gx-K1P - K 2T
第二步, 如果進行操作壓力下的溫度影響修正, 應該首先在常溫下完成壓力修正工作。在不改變溫度的條件下,壓力修正公式為:壓力修正重量(GYX)=Gx-K1P
第三步,完成壓力影響修正工作后,在操作壓力下讀取溫度影響數據, 按照以下關系計算出溫度修正系數����。G = G Y X- K 2 T 公式中K 1和K 2是修正系數, 由設備的開口位置�����、大小��、管道連接方式決定。每個罐的修正系數K 1和K 2不相同, 其差值由膨脹節制造差異性和罐體開口�����、管道施工等差異性造成����。另外, 個別閥門的開啟和關閉會影響罐體在垂直方向的受力面積,由此造成修正系數K1的變化。因此需要根據工藝過程����、閥兩端壓力差�、受力狀態等因素,驗證修正系數K1的適用條件�����。
4.3 K1 和K2 的實際計算
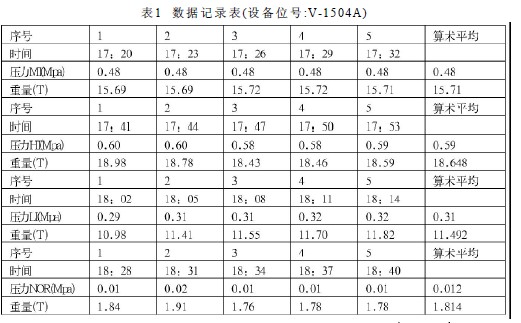
K 1和K 2的理論計算較繁, 在目前的情況下, 實際測量比較容易, 各讀取3個狀態(常壓、操作壓力、中間壓力和常溫��、操作溫度��、中間溫度)下的設備稱重儀顯示數據得出“加載-響應情況”,即可以計算得出K1和K2,基本可以滿足工藝控制精度�。我們對壓力影響數據的測量方法為,在常壓條件下,待稱重顯示數據穩定5min后以固定的時間間隔(2~5min)讀取數據,數據數量以5 ~7 個為宜, 以該組數據的算術平均值為計算依據���。常壓下的數據作為物料重量使用壓力影響的數據記錄在數據記錄表中�。操作壓力和中間壓力條件下測量數據的方法和上面相同, 中間壓力條件下測量數據作為參考, 用于檢查修正系數K1的線性。以V-1504A的K1計算為例,見表1。
5.3.1 壓力修正系數K1的計算。
K1=(操作壓力下顯示重量-常壓下顯示重量)/(操作壓力常壓)式中,重量單位噸( T),壓力單位兆帕(MPa), K 1=(18.648-1.814)/(0.59-0.012)=16.834/0.578=29.1246。
5.3.2 溫度修正系數K2的計算
完成壓力影響修正工作后, 進行溫度影響數據測量工作。在操作壓力、常溫條件下,待設備稱重儀顯示數據穩定5分鐘后以固定的時間間隔(2~5min)讀取數據,數據數量以5 ~7 個為宜, 以該組數據的算術平均值為計算依據�����。操作壓力����、常溫條件下的數據作為壓力修正重量(GYX)使用,其后續計算方法基本同K1。實測表明,溫度影響的偏差很小,基本可以忽略,這里溫度影響的數據記錄及計算不再贅述。
4.4修正后的驗證
裝置運行后和運行期間, 隨著裝置負荷的變化和運行時間的推移,設備框架���、設備管道應力狀態都會持續發生變化, 從而影響K1和K2的修正效果。應該注意觀察,及時調整,K1和K2經過幾次調整后會穩定。修正后原稱重儀的量程需要同步修改,我們考慮裝置操作人員的需要,在DCS顯示屏保留現在的設備稱重儀顯示數據,增加修正后的重量數據參考顯示。
5 結語
電子稱重系統在過程控制中的應用已越來越廣泛,但如何提高應用水平,使之達到應有的測量精度,設備安裝中一定要重視安裝質量, 特別注意膨脹節制造差異性和罐體開口�、管道施工���、管道連接方式����、是否存在剛性連接等關鍵問題, 將壓力和溫度兩個因素對設備稱重儀系統造成的影響降到較低�。如果稱重儀系統受到變化的壓力和溫度兩個因素的影響, 通過找出影響規律建立修正數學模型后, 完全能夠滿足過程工業控制的需要。
相關推薦